

2023-07-12
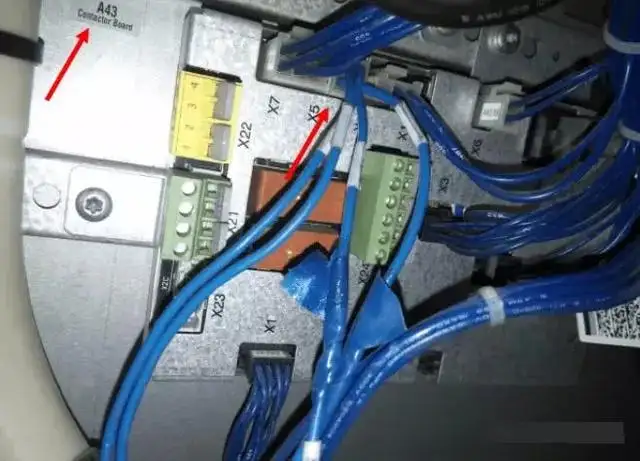
2. Xử lý lỗi đoản mạch của bảng ngắn mạch mô-đun nguồn rô-bốt ABB
Yếu tố con người: Phần cứng hoán đổi nóng rất nguy hiểm và nhiều lỗi bảng mạch là do hoán đổi nóng.Việc sử dụng lực không đúng cách khi cắm thẻ và phích cắm có nguồn điện có thể làm hỏng giao diện, chip, v.v., dẫn đến hỏng bảng mạch của robot;Khi thời gian sử dụng robot tăng lên, các linh kiện trên board mạch của robot sẽ tự nhiên bị lão hóa dẫn đến hỏng board mạch của robot.
Yếu tố môi trường: Do người vận hành bảo dưỡng không đúng cách, bảng mạch của robot bị bám bụi, có thể gây đoản mạch tín hiệu.
3. Khi nào cần sao lưu robot công nghiệp
Sau lần bật nguồn đầu tiên của máy mới.
Trước khi thực hiện bất kỳ sửa đổi nào.
3. Sau khi hoàn thành các sửa đổi.
4. Nếu robot công nghiệp là quan trọng, chúng nên được thực hiện đều đặn mỗi tuần một lần.
5. Tốt nhất là tạo một bản sao lưu trên ổ USB.
6. Thường xuyên xóa các bản sao lưu cũ để giải phóng dung lượng ổ cứng.
4. Cách xử lý khi bật robot mà mặt dây dạy vẫn hiển thị giao diện sau
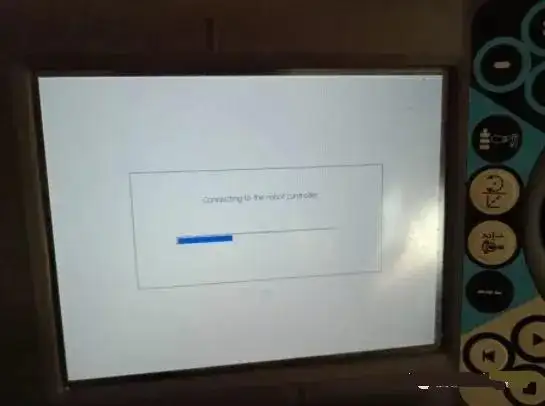 Tình huống trên là không có kết nối liên lạc được thiết lập giữa mặt dây chuyền giảng dạy và bộ điều khiển chính của robot và các lý do không thiết lập kết nối bao gồm:
Tình huống trên là không có kết nối liên lạc được thiết lập giữa mặt dây chuyền giảng dạy và bộ điều khiển chính của robot và các lý do không thiết lập kết nối bao gồm:
1. Máy chủ rô-bốt bị lỗi.
2. Thẻ CF (thẻ SD) tích hợp của máy chủ robot bị lỗi.
3. Cáp mạng giữa mặt dây giảng dạy và máy chủ bị lỏng, v.v.
Phương pháp xử lý: 1. Kiểm tra xem máy chủ có bình thường không và thẻ SD trong máy chủ có bình thường không.
2. Kiểm tra xem cáp mạng từ giá đỡ giảng dạy đến máy chủ có được kết nối đúng cách không.
5. Ý nghĩa của lời nhắc thời gian bảo trì 10106 khi robot hiển thị thông báo cảnh báo là gì?
Tình huống này là lời nhắc bảo trì định kỳ thông minh của rô-bốt ABB.
6. Làm thế nào để xử lý sự cố hệ thống khi rô-bốt chuyển sang trạng thái bật nguồn?
1. Khởi động lại robot một lần.
Nếu không, hãy kiểm tra mặt dây chuyền giảng dạy để biết thêm lời nhắc cảnh báo chi tiết và thực hiện hành động.
3. Khởi động lại.
4. Nếu vẫn không giải phóng được, hãy thử khởi động B.
5. Nếu vẫn không được, vui lòng thử P khởi động.
6. Nếu nó vẫn không hoạt động, vui lòng thử Tôi khởi động (thao tác này sẽ đưa rô bốt trở về cài đặt gốc, hãy cẩn thận).
7. Có thể chia sẻ bản sao lưu của rô bốt cho nhiều rô bốt không?
Không. Ví dụ: bản sao lưu của rô-bốt A chỉ có thể được sử dụng cho rô-bốt A, không được dùng cho rô-bốt B hoặc C, vì điều này có thể gây ra lỗi hệ thống.
8. Những tập tin nào có thể được chia sẻ trong bản sao lưu của robot?
Nếu hai robot có cùng kiểu dáng và cấu hình.Bạn có thể chia sẻ chương trình RAPID và tệp EIO, nhưng sau khi chia sẻ, nó cũng cần được xác minh trước khi có thể sử dụng bình thường.
9. Nguồn gốc cơ học của người máy là gì?Nguồn gốc cơ học ở đâu?
Mỗi động cơ trong số sáu động cơ servo của rô-bốt có nguồn gốc cơ học cố định duy nhất.Cài đặt gốc cơ học của rô-bốt không chính xác sẽ gây ra các vấn đề như rô-bốt di chuyển hạn chế hoặc không chính xác, không thể đi theo đường thẳng và gây hư hỏng nghiêm trọng cho rô-bốt.
10. Làm cách nào để xóa cảnh báo giám sát hành động của robot 50204?
1. Sửa đổi các thông số giám sát hành động của robot (trong menu giám sát hành động của bảng điều khiển) cho phù hợp với tình hình thực tế.
2. Sử dụng lệnh AccSet để giảm gia tốc của robot.
3. Giảm v trong dữ liệu tốc độ_ Tùy chọn thối.
11. Làm cách nào để xử lý cảnh báo "50296, chênh lệch dữ liệu bộ nhớ SMB" khi bật nguồn lần đầu tiên đối với robot?
1. Chọn Hiệu chỉnh từ menu chính của ABB.
2. Nhấp vào ROB_ 1. Vào màn hình hiệu chuẩn và chọn bộ nhớ SMB.
3. Chọn "Nâng cao", nhập và nhấp vào "Xóa bộ nhớ tủ điều khiển".
4. Sau khi hoàn thành, nhấp vào "Đóng" rồi nhấp vào "Cập nhật".
5. Chọn 'Tủ điều khiển hoán đổi hoặc cánh tay rô-bốt, cập nhật tủ điều khiển với dữ liệu bộ nhớ SMB'.
12. Làm cách nào để tùy chỉnh tốc độ quỹ đạo chuyển động của robot trong chương trình RAPID?
1. Chọn Dữ liệu chương trình từ menu chính của mặt dây giảng dạy.
2. Sau khi tìm thấy kiểu dữ liệu Speeddata, nhấp vào Mới.
3. Click vào giá trị ban đầu, và ý nghĩa của 4 biến Speeddata là: v_ TCP thể hiện tốc độ chạy tuyến tính của robot, v_ Rot thể hiện tốc độ quay của robot, v_ Leax thể hiện tốc độ hoạt động tuyến tính của trục ngoài , v_ Reax biểu thị tốc độ quay của trục ngoài.Nếu không có trục bên ngoài, hai cái cuối cùng không cần phải sửa đổi.
4. Dữ liệu tùy chỉnh có thể được gọi trong chương trình RAPID.
13. Khắc phục 6 lỗi thường gặp khi sửa chữa động cơ Servo Robot của ABB
1. Cách xử lý lỗi tràn bộ đếm lỗi động cơ khi quay tốc độ cao?
Lỗi tràn bộ đếm lỗi động cơ xảy ra trong quá trình quay tốc độ cao.
Biện pháp đối phó 1: Kiểm tra xem đấu dây của cáp nguồn động cơ và cáp encoder có đúng không và cáp có bị hỏng không.
Lỗi tràn bộ đếm lỗi động cơ xảy ra khi nhập một xung lệnh dài.
Lỗi tràn bộ đếm lỗi động cơ xảy ra trong quá trình hoạt động.
Biện pháp đối phó 2: Tăng giá trị cài đặt mức tràn của bộ đếm lỗi;Làm chậm tốc độ quay;Kéo dài thời gian tăng giảm tốc;Tải quá nặng, phải chọn động cơ công suất lớn hơn từ đầu hoặc giảm tải, lắp các tổ chức truyền động như hộp giảm tốc để tăng tải.
2. Phải làm gì nếu nó không hoạt động khi có xung đầu ra?
Giám sát giá trị hiện tại của đầu ra xung của bộ điều khiển và liệu đèn đầu ra xung có nhấp nháy hay không, xác nhận rằng xung lệnh đã được thực hiện và hiện đang xuất ra bình thường;
Kiểm tra xem cáp điều khiển, cáp nguồn và cáp mã hóa từ bộ điều khiển đến trình điều khiển có được nối sai, bị hỏng hoặc tiếp xúc kém không;
Kiểm tra xem phanh của động cơ servo có phanh đã được mở chưa;
Giám sát xem bảng điều khiển servo có xác nhận đầu vào của các lệnh xung hay không;
Lệnh Run hoạt động bình thường;
Hình thức điều khiển phải chọn hình thức điều khiển có hướng;
Loại xung đầu vào được thiết lập bởi trình điều khiển servo có phù hợp với thiết lập của xung lệnh không;
Đảm bảo rằng ổ đĩa phía quay tích cực bị dừng, tín hiệu dừng ổ đĩa phía quay và tín hiệu đặt lại bộ đếm lỗi không được đưa vào, tải bị ngắt và hoạt động không tải diễn ra bình thường.Kiểm tra hệ thống máy móc.
3. Không báo quá tải có tải thì phải làm sao?
Nếu nó xảy ra khi tín hiệu Chạy séc-vô được kết nối và không có xung nào được phát ra:
Kiểm tra hệ thống dây cáp nguồn của mô tơ servo để xem có tiếp xúc kém hoặc hư hỏng cáp không;Nếu là động cơ servo có phanh thì phải bật phanh;Mức tăng của vòng lặp tốc độ có được đặt quá cao không;Hằng số thời gian tích phân của vòng lặp tốc độ được đặt quá nhỏ.
Nếu servo chỉ trục trặc trong khi vận hành:
Mức tăng của mạch phương vị có được đặt quá cao không;Là biên độ hoàn thành định vị thiết lập quá nhỏ;Kiểm tra xem có rôto nào bị khóa trên trục động cơ servo không và điều chỉnh máy từ đầu.
4. Làm thế nào để xử lý các âm thanh hoặc rung động bất thường trong quá trình vận hành?
Hệ thống dây điện servo:
Sử dụng cáp nguồn, cáp mã hóa, cáp điều khiển và cáp tiêu chuẩn để kiểm tra hư hỏng;Kiểm tra xem có nguồn gây nhiễu nào gần đường điều khiển không và liệu chúng có song song hoặc quá gần với dây cáp điện có dòng điện cao gần đó không;Kiểm tra xem có bất kỳ thay đổi nào về tiềm năng của thiết bị đầu cuối nối đất để đảm bảo nối đất tốt.
Thông số servo:
Cài đặt mức tăng servo quá lớn và nên điều chỉnh thủ công hoặc chủ động các tham số servo từ đầu;Thừa nhận cài đặt hằng số thời gian của bộ lọc đáp ứng tốc độ, với giá trị ban đầu là 0, có thể tăng giá trị cài đặt bằng cách thử nghiệm;Cài đặt tỷ số truyền điện tử quá lớn, nên khôi phục cài đặt gốc;Cộng hưởng giữa hệ thống servo và hệ thống cơ khí, kiểm tra và điều chỉnh tần số và biên độ của bộ lọc notch.
Hệ thống cơ khí:
Khớp nối trục động cơ và hệ thống thiết bị bị lệch, vít lắp đặt không được siết chặt;Sự ăn khớp kém của ròng rọc hoặc bánh răng cũng có thể dẫn đến thay đổi mô-men xoắn tải.Kiểm tra hoạt động không tải.Nếu hoạt động không tải bình thường, hãy kiểm tra xem có bất thường nào trong phần liên kết của hệ thống cơ khí không;Thừa nhận quán tính tải, mô-men xoắn và tốc độ có quá lớn hay không, kiểm tra hoạt động không tải và nếu hoạt động không tải bình thường, hãy giảm tải hoặc thay thế trình điều khiển và động cơ có công suất lớn hơn.
5. Làm thế nào để xử lý việc điều khiển định hướng và định vị không chính xác trong quá trình sửa chữa động cơ servo của rô-bốt ABB?
Đầu tiên, xác nhận xem giá trị xung được khai báo thực tế của bộ điều khiển có phù hợp với giá trị mong đợi hay không, nếu không, hãy kiểm tra và sửa chương trình;
Giám sát xem số lệnh xung mà trình điều khiển séc-vô nhận được có khớp với lệnh do bộ điều khiển thông báo hay không.Nếu không, hãy kiểm tra cáp điều khiển;Kiểm tra xem cài đặt của dạng xung lệnh séc-vô có nhất quán với cài đặt bộ điều khiển, chẳng hạn như CW/CCW hoặc xung+hướng;
Cài đặt mức tăng servo quá lớn, vui lòng điều chỉnh mức tăng servo theo cách thủ công hoặc chủ động từ đầu;Động cơ servo dễ bị lỗi tích lũy trong quá trình chuyển động tịnh tiến.Nên đặt tín hiệu gốc cơ học trong các điều kiện mà quy trình cho phép và thực hiện thao tác tìm kiếm gốc trước khi sai số vượt quá thang đo cho phép;Bản thân hệ thống cơ khí có độ chính xác thấp hoặc tổ chức truyền động bất thường (chẳng hạn như sai lệch khớp nối giữa động cơ servo và hệ thống thiết bị).
6. Sửa chữa động cơ servo rô-bốt ABB, vận hành điều khiển hướng, báo cáo lỗi quá tốc độ.Làm thế nào để xử lý nó?
Ngay khi tín hiệu Chạy servo được kết nối, nó sẽ kích hoạt: kiểm tra xem đấu dây của cáp nguồn động cơ servo và cáp bộ mã hóa có đúng và không bị hư hại không.
14. Robot công nghiệp của ABB được bảo dưỡng định kỳ như thế nào?
Trước khi "kiểm tra phanh" hoạt động bình thường, cần kiểm tra phanh động cơ của từng trục.Phương pháp kiểm tra phanh động cơ như sau:
1. Chạy trục của từng cánh tay rô-bốt đến vị trí chịu tải tối đa.
2. Xoay công tắc chọn chế độ động cơ trên bộ điều khiển rô-bốt sang vị trí MOTORS OFF.
3. Kiểm tra xem trục có ở vị trí ban đầu không.Nếu cánh tay cơ vẫn duy trì vị trí của nó sau khi tắt động cơ, điều đó cho thấy phanh đang ở tình trạng tốt.
Nguy cơ mất chức năng vận hành giảm tốc (250mm/s)
Không thay đổi tỷ số truyền hoặc các thông số chuyển động khác từ máy tính hoặc giá đỡ giảng dạy.Điều này sẽ ảnh hưởng đến chức năng vận hành giảm tốc (250mm/s).
15. Một số điểm cần chú ý khi sử dụng an toàn đồ dùng dạy học:
Nút kích hoạt thiết bị được cài đặt trên mặt dây chuyền giảng dạy, khi được nhấn nửa chừng, hệ thống sẽ chuyển sang chế độ MOTORS ON.Khi nhả nút hoặc nhấn hoàn toàn, hệ thống sẽ chuyển sang chế độ TẮT ĐỘNG CƠ.
16. Để sử dụng đồ dùng dạy học được an toàn cần tuân thủ các nguyên tắc sau:
1.Khi nút Kích hoạt thiết bị không thể mất chức năng trong quá trình lập trình hoặc gỡ lỗi và robot không cần di chuyển, hãy nhả ngay nút Kích hoạt thiết bị.
2. Khi nhân viên lập trình vào khu vực an toàn, họ phải luôn mang theo dây chuyền dạy học trên người để ngăn người khác di chuyển robot.
17. Khi làm việc trong phạm vi làm việc của cánh tay rô bốt phải tuân thủ các điểm sau:
1. Công tắc lựa chọn chế độ trên bộ điều khiển phải được chuyển sang vị trí thủ công để vận hành thiết bị cho phép ngắt kết nối máy tính hoặc điều khiển từ xa;
2. Khi bật công tắc chọn chế độ
3. Chú ý đến trục quay của cánh tay robot, cẩn thận khi tóc hoặc quần áo bị lẫn vào nhau.Ngoài ra, hãy chú ý đến các bộ phận hoặc thiết bị được chọn khác trên cánh tay rô-bốt;
4. Kiểm tra phanh động cơ của từng trục.
18. Độ lệch cảm ứng
Hiện tượng 1: Vị trí các ngón tay chạm vào không trùng với mũi tên chuột.
Lý do: Sau khi cài đặt chương trình điều khiển, mặt dây chuyền giảng dạy không chạm thẳng vào tâm của vị trí hồng tâm trong quá trình hiệu chuẩn.
Giải pháp: Hiệu chỉnh lại vị trí.
Hiện tượng 2: Có vùng cảm ứng chính xác, có vùng cảm ứng bị lệch.
Nguyên nhân: Một lượng lớn bụi hoặc cặn tích tụ trên các sọc phản xạ âm thanh xung quanh màn hình cảm ứng sóng âm Surface, ảnh hưởng đến việc truyền tín hiệu âm thanh.
Giải pháp: Vệ sinh màn hình cảm ứng, đặc biệt chú ý vệ sinh các sọc phản xạ sóng âm ở tất cả các mặt của màn hình cảm ứng.Khi vệ sinh, hãy ngắt nguồn điện của thẻ điều khiển màn hình cảm ứng.
19. Dạy chạm mặt dây chuyền không có phản ứng
Hiện tượng: Khi chạm vào màn hình mũi tên chuột không di chuyển và không thay đổi vị trí.
Nguyên nhân: Có nhiều nguyên nhân dẫn đến hiện tượng này, cụ thể như sau:
1. Bụi hoặc cặn tích tụ trên các sọc phản xạ âm xung quanh màn hình cảm ứng sóng âm Surface rất nghiêm trọng, khiến màn hình cảm ứng không hoạt động;
2. Màn hình cảm ứng bị trục trặc;
3. Thẻ điều khiển màn hình cảm ứng bị trục trặc;
4. Đường tín hiệu màn hình cảm ứng bị trục trặc;
5. Cổng nối tiếp của máy chủ bị trục trặc;
6. Hệ thống điều hành của mặt dây chuyền giảng dạy bị trục trặc;
7. Lỗi cài driver màn hình cảm ứng.
Giải pháp: Quan sát đèn báo tín hiệu màn hình cảm ứng nhấp nháy thường xuyên trong các trường hợp bình thường, khoảng một lần mỗi giây.
Khi chạm vào màn hình, mặt dây chuyền giảng dạy chuyển sang màu đen, đây là một vấn đề phức tạp.Nếu tiết kiệm năng lượng đèn nền được đặt, màn hình đen là bình thường;Nếu từ thứ hai trong khu vực điều khiển hệ thống vô tình bị thao tác, màn hình cũng sẽ chuyển sang màu đen.Nếu hai điểm đầu tiên bị loại trừ, hãy cập nhật chương trình cơ sở mới nhất để xem xét.
Gửi yêu cầu của bạn trực tiếp cho chúng tôi

