
Nguồn gốc:
Trung Quốc
Hàng hiệu:
YOUNGYOU
Chứng nhận:
CE
Số mô hình:
LT-PG3-80B-PB
Liên hệ chúng tôi
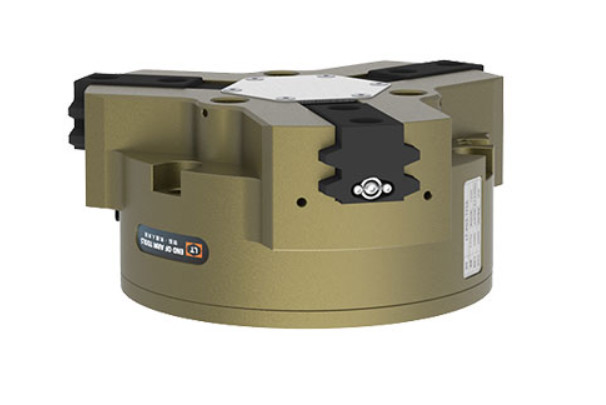
LT-PG3-80B-PB Ba tâm kẹp cơ khí được chỉ định Độ chính xác lặp đi lặp lại 0,01
Các chức năng chính của bộ phận cuối cùng của con người
Robot end effector là một thuật ngữ chuyên ngành trong ngành công nghiệp rô-bốt, có thể khó hiểu đối với nhiều người dùng không quen thuộc với ngành công nghiệp rô-bốt.Nói một cách đơn giản, end effector là bộ phận cầm nắm và hoạt động của robot, tương đương với bàn tay và ngón tay của con người.Chức năng chính của thành phần này là lấy phôi và thực hiện các nhiệm vụ công việc liên quan khác nhau, và nó là thành phần chính rất quan trọng trong các sản phẩm rô bốt.
Các loại chính của hiệu ứng cuối robot
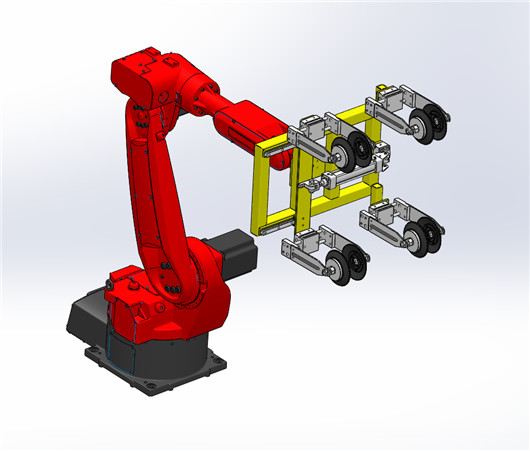
Hiện tại, theo nhu cầu của các doanh nghiệp khác nhau, WOMMER Worm đã phát triển nhiều hình dạng và chức năng khác nhau của bộ phận tác động cuối rô-bốt, bao gồm bộ truyền động kẹp gắp song song hai ngón tay và bộ truyền động kẹp gắp song song ba ngón tay.Ngoài ra, để robot có thể xử lý các phôi lớn tốt hơn, còn có các bộ truyền động cuối sử dụng năng lượng khí nén làm nguồn năng lượng để cung cấp động năng lớn hơn cho robot,
Bộ phận hiệu ứng cuối rô-bốt là trọng tâm của nghiên cứu và phát triển sản phẩm rô-bốt.Hiện tại, các doanh nghiệp sản xuất rô-bốt như WOMMER Worm đã phát triển các bộ hiệu ứng cuối với nhiều chức năng và đặc điểm khác nhau, đồng thời mang lại hiệu suất làm việc tuyệt vời cho các doanh nghiệp trong sử dụng thực tế.
![]()
Về công ty
Đường ray dẫn hướng của chúng tôi đã hợp tác với nhiều thương hiệu robot nổi tiếng quốc tế, chẳng hạn nhưABB KUKA FANUC Yaskawa UR.Các công ty tham gia chủ yếu bao gồm xếp hàng lên pallet, xếp dỡ hàng hóa.Tải trọng của ray dẫn hướng dao động từ500kg đến 5000kg.Chiều dài của ray dẫn hướng được tùy chỉnh theo nhu cầu của khách hàng.Chúng tôi đã tạo ra một trường hợp rô bốt ABB IRB6700 tương ứng với 20 máy CNC và một đường ray dẫn hướng dài 50m hoàn thành chuyển động tịnh tiến, tải và dỡ tải của rô bốt.Số lượng robot giảm đáng kể và tiết kiệm chi phí tích hợp.
Công ty chúng tôi cũng cung cấp robot công nghiệp với giá rất ưu đãi để đặt hàng với giá thấp hơn.
Chào mừng bạn đến Thượng Hải, Trung Quốc, để khám phá rô-bốt và đường ray của chúng tôi!
Công ty cung cấp sản phẩm
người máy ABB
người máy KUKA
người máy Yaskawa
người máy Fanuc
người máy của bạn
cộng tác viên
Hướng dẫn đường sắt
Cobot sản xuất tại Trung Quốc
thông số kỹ thuật sản phẩm
| người mẫu | LT-PG2-80B-PB |
| Hành trình một ngón tay (mm) | 4 |
| Lực giữ tối thiểu (N) | / |
| Lực đóng (N) | 3780 |
| Trương Khải Lệ (N) | 4120 |
| Trọng lượng phôi đề xuất (kg) ① | 18,9 |
| Trọng lượng bản thân (kg) | 1.1 |
| Áp suất không khí tối thiểu (Mpa) | 0,4 |
| Áp suất không khí định mức (Mpa) | 0,6 |
| Áp suất không khí tối đa (Mpa) | 0,6 |
| Cấp độ bảo vệ (IP) | IP40 |
| Thời gian mở/đóng (s) | 0,1/0,1 |
| Độ chính xác lặp lại (mm) | 0,01 |
| Lượng gas tiêu thụ (cm3) (hai chiều) | 120 |
| Chiều dài ngón tay tối đa (mm) | 80 |
| Trọng lượng ngón tay tối đa (kg) | 0,6 |
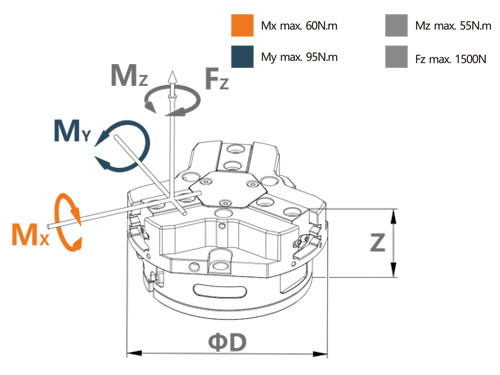
| Mô-men xoắn Mx (N · m) | 60 |
| Khoảnh Khắc Của Tôi (N·m) | 95 |
| Momen Mz (N · m) | 55 |
| Lực dọc trục lớn nhất Fz (N) | 1500 |
Bảng thông số sản phẩm
![]()
![]()
![]()
Đóng gói và Vận chuyển
![]()
![]()
Gửi yêu cầu của bạn trực tiếp cho chúng tôi

